
gcc是如何实现OpenMP parallel for的
- 编译原理
- 2025-06-02
- 100热度
- 0评论
学习网页
本次我们主要会聚焦team.c 和loop.c:
gcc/libgomp/loop.c at master · gcc-mirror/gcc
gcc/libgomp/team.c at master · gcc-mirror/gcc
OpenMP For Construct dynamic 调度方式实现原理和源码分析 - 一无是处的研究僧 - 博客园
TL; DR
TL;DR: 大概idea就是,先分块,后并行。并行的模块我们上节课已经学习过了
例子与入口API
整体结构:
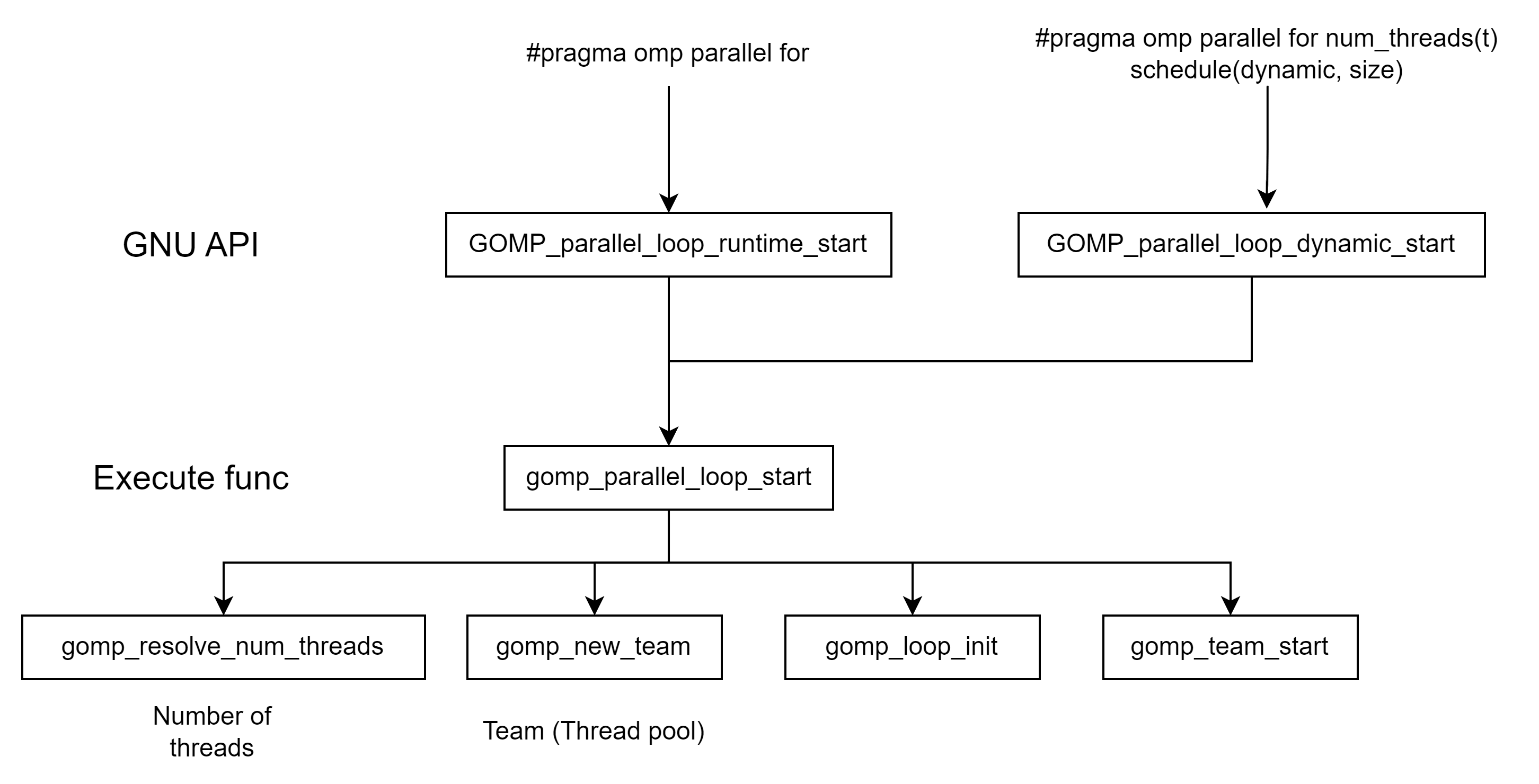
for这里主要分为两个层。API层和Execute func层。GCC在看到你的代码后,会在API层里选择适合你的代码的API层。随后他们将统一调动execute func层,其内部又有多层的逻辑(后面会分析)。
我们先从cpp的matmul讲起
#include <omp.h>
#include <iostream>
#include <vector>
void matrix_multiply(const std::vector<std::vector<double>>& A,
const std::vector<std::vector<double>>& B,
std::vector<std::vector<double>>& C,
int rows_A, int cols_A, int cols_B) {
#pragma omp parallel for
for (int i = 0; i < rows_A; ++i) {
for (int j = 0; j < cols_B; ++j) {
double sum = 0.0;
for (int k = 0; k < cols_A; ++k) {
sum += A[i][k] * B[k][j];
}
C[i][j] = sum;
}
}
}
int main() {
int rows_A = 100, cols_A = 100, cols_B = 100;
std::vector<std::vector<double>> A(rows_A, std::vector<double>(cols_A, 1.0));
std::vector<std::vector<double>> B(cols_A, std::vector<double>(cols_B, 1.0));
std::vector<std::vector<double>> C(rows_A, std::vector<double>(cols_B, 0.0));
double start_time = omp_get_wtime();
matrix_multiply(A, B, C, rows_A, cols_A, cols_B);
double end_time = omp_get_wtime();
std::cout << "Time taken: " << end_time - start_time << " seconds\n";
return 0;
}循环虽然外部写了循环100次,但是内部 for (int i = 0; i < rows_A; ++i) for (int j = 0; j < cols_B; ++j)没有写的情况下,大部分时候编译器会认为这是运行时决定,会把这个for 变为 GOMP_parallel_loop_runtime_start (欢迎大家debug)(就算不是也没关系,其他的几个实现都是大同小易的):
void
GOMP_parallel_loop_runtime_start (void (*fn) (void *), void *data,
unsigned num_threads, long start, long end,
long incr)
{
struct gomp_task_icv *icv = gomp_icv (false);
gomp_parallel_loop_start (fn, data, num_threads, start, end, incr,
icv->run_sched_var & ~GFS_MONOTONIC,
icv->run_sched_chunk_size, 0);
}这只是一个暴露在外的API(icv上节课也讲了,是debug标记)。其内部实现是:
/* The GOMP_parallel_loop_* routines pre-initialize a work-share construct
to avoid one synchronization once we get into the loop. */
static void
gomp_parallel_loop_start (void (*fn) (void *), void *data,
unsigned num_threads, long start, long end,
long incr, enum gomp_schedule_type sched,
long chunk_size, unsigned int flags)
{
struct gomp_team *team;
num_threads = gomp_resolve_num_threads (num_threads, 0);
team = gomp_new_team (num_threads);
gomp_loop_init (&team->work_shares[0], start, end, incr, sched, chunk_size);
gomp_team_start (fn, data, num_threads, flags, team, NULL);
}我们看到这段有这么几个流程:
- 确定线程数
gomp_resolve_num_threads(num_threads, 0) - 创建team(并行域内的线程组)
gomp_new_team (num_threads) - 划分数据
gomp_loop_init (&team->work_shares[0], start, end, incr, sched, chunk_size) - 启动线程
gomp_team_start (fn, data, num_threads, flags, team, NULL)
我们在上集已经解说了 确定线程数和启动线程 这两个函数,大家看完后大概就能对这两个函数能理解了 gcc是怎么实现OpenMP的? - 知乎。简单来说,他们的逻辑就是:
- 线程数由我们自己输入(N)确定或者由系统最大的线程数量确定
- 启动线程时,是用一个for循环,不停pthread_create创建线程,每个新线程将执行我们的并行函数(这里这个并行函数叫subfunction)
那我们继续,在此之前,我们回顾一下team的结构,which 我们已经在上集解说了 。但我们可以再复习一遍:
struct gomp_taskgroup
{
_Bool in_taskgroup_wait;
int num_children;
} l;
struct gomp_team
{
int task_queue;
int task_running_count;
};
struct gomp_thread
{
struct gomp_team_state ts;
struct gomp_task task;
} extern __thread a;
enum gomp_schedule_type
{
GFS_RUNTIME, // runtime 调度方式
GFS_STATIC, // static 调度方式
GFS_DYNAMIC, // dynamic 调度方式
GFS_GUIDED, // guided 调度方式
GFS_AUTO // auto 调度方式
};struct gomp_team 是 OpenMP 用来表示一个 并行区域内线程组(team) 的数据结构,它记录了所有线程的公共状态,如:
- 所有线程共享的循环调度信息(work_share)
- tasking 状态(task_queue、task_running_count)
- barrier、lock、cancel 状态等同步信息
每次你执行#pragma omp parallel num_threads(N),OpenMP 就会创建一个新的 gomp_team 对象,并把当前线程(通常是主线程)和新创建的工作线程组织成一个 team。(听起来很像CUDA里warp的概念)
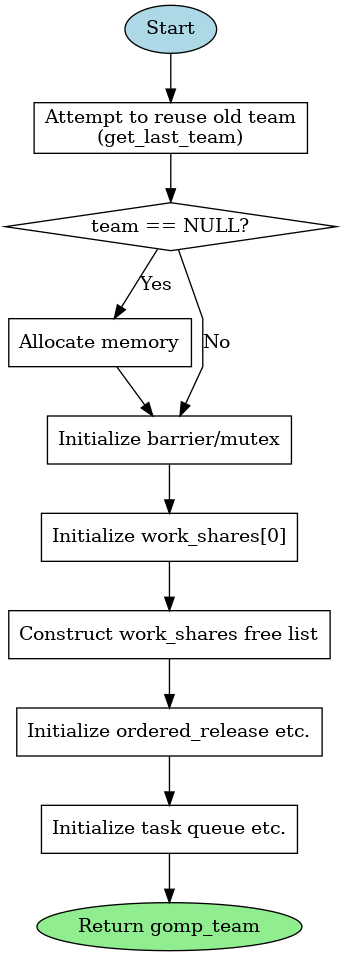
接下来我们看看OpenMP是怎么创建team的,我把注释表在下面了(部分基于GPT4o):
/* Create a new team data structure. */
struct gomp_team *
gomp_new_team (unsigned nthreads)
{
struct gomp_team *team;
int i;
team = get_last_team (nthreads); // 尝试复用已有 team(线程池复用),节省开销。
// 若没有可复用的 team,就用堆分配新内存(注意末尾为每线程附加结构预留了空间)
if (team == NULL)
{
size_t extra = sizeof (team->ordered_release[0])
+ sizeof (team->implicit_task[0]); //`ordered_release[]`:用于支持 `#pragma omp ordered`, `implicit_task[]`:每个线程的默认 task
#ifdef GOMP_USE_ALIGNED_WORK_SHARES
team = gomp_aligned_alloc (__alignof (struct gomp_team),
sizeof (*team) + nthreads * extra);
#else
team = team_malloc (sizeof (*team) + nthreads * extra);
#endif
// 初始化用于线程同步的 barrier 和锁
#ifndef HAVE_SYNC_BUILTINS
gomp_mutex_init (&team->work_share_list_free_lock);
#endif
gomp_barrier_init (&team->barrier, nthreads);
gomp_mutex_init (&team->task_lock);
team->nthreads = nthreads;
}
// - 初始化主线程的循环分配结构 `work_shares[0]`。
// `work_shares_to_free` 指向当前活动的 work_share。
team->work_share_chunk = 8;
#ifdef HAVE_SYNC_BUILTINS
team->single_count = 0;
#endif
team->work_shares_to_free = &team->work_shares[0];
gomp_init_work_share (&team->work_shares[0], 0, nthreads);
team->work_shares[0].next_alloc = NULL;
team->work_share_list_free = NULL;
// - 构建一个简单的 free list 池,用于后续分配嵌套循环时快速分配新的 `work_share`。
team->work_share_list_alloc = &team->work_shares[1];
for (i = 1; i < 7; i++)
team->work_shares[i].next_free = &team->work_shares[i + 1];
team->work_shares[i].next_free = NULL;
// 初始化 `ordered` 结构,供 `#pragma omp ordered` 使用。
gomp_sem_init (&team->master_release, 0);
team->ordered_release = (void *) &team->implicit_task[nthreads];
team->ordered_release[0] = &team->master_release;
// 初始化任务队列和任务状态计数器,为 task 构造器准备好。
priority_queue_init (&team->task_queue);
team->task_count = 0;
team->task_queued_count = 0;
team->task_running_count = 0;
team->work_share_cancelled = 0;
team->team_cancelled = 0;
team->task_detach_count = 0;
return team;
}OpenMP 运行时会调用这个函数,为当前并行区域的执行准备所有共享状态,包括:
- 线程数量
- 工作划分信息
- barrier 和锁
- task 队列
- ordered 结构
- 工作共享结构 work_shares(用于 for 循环)
下面是这个函数的调用逻辑
- reuse old team / 新建 new team
- 初始化锁(后续同步会使用)
- 初始化 work shares
- 创建task queues
| 字段 | 含义 |
|---|---|
work_shares |
gomp_team 中保存 for 循环调度信息的缓存数组 |
gomp_work_share |
描述某一个 for 循环的调度状态:范围、策略、当前进度等 |
team->work_shares[0] |
当前 active 并行 for 循环对应的调度器 |
| 使用方式 | 每个线程在执行前调用 GOMP_loop_*_next() 从中获取 chunk |
work_share
Libgomp: gomp_work_share Struct Reference

在 libgomp 中,work_share 是一个用于协调线程间工作划分的数据结构。
当你使用 #pragma omp for 等语句时,OpenMP 会创建一个 work_share 结构体,它记录循环的区间、步长、调度策略等内容,供所有线程共享,实现合理分工与同步。
在并行循环中,我们要把一个大的迭代区间分给多个线程执行。
这个分工要满足几个要求:
- 线程不能抢重复任务
- 支持不同调度策略(static/dynamic/guided)
- 能检测循环是否结束
- 支持有序执行(ordered)
所以,OpenMP 为每一个 parallel for 语句都构造一个 gomp_work_share,用它来协调线程之间的分工和同步。
struct gomp_work_share
{
/* This member records the SCHEDULE clause to be used for this construct.
The user specification of "runtime" will already have been resolved.
If this is a SECTIONS construct, this value will always be DYNAMIC. */
enum gomp_schedule_type sched;
int mode;
union {
struct {
/* This is the chunk_size argument to the SCHEDULE clause. */
long chunk_size;
/* This is the iteration end point. If this is a SECTIONS construct,
this is the number of contained sections. */
long end;
/* This is the iteration step. If this is a SECTIONS construct, this
is always 1. */
long incr;
};
struct {
unsigned long long chunk_size_ull;
unsigned long long end_ull;
unsigned long long incr_ull;
};
};
union {
unsigned *ordered_team_ids;
struct gomp_doacross_work_share *doacross;
};
/* This is the number of threads that have registered themselves in
the circular queue ordered_team_ids. */
unsigned ordered_num_used;
/* This is the team_id of the currently acknowledged owner of the ordered
section, or -1u if the ordered section has not been acknowledged by
any thread. This is distinguished from the thread that is *allowed*
to take the section next. */
unsigned ordered_owner;
unsigned ordered_cur;
/* This is a chain of allocated gomp_work_share blocks, valid only
in the first gomp_work_share struct in the block. */
struct gomp_work_share *next_alloc;
/* This lock protects the update of the following members. */
#ifdef GOMP_USE_ALIGNED_WORK_SHARES
gomp_mutex_t lock __attribute__((aligned (64)));
#else
char pad[64 - offsetof (struct gomp_work_share_1st_cacheline, pad)];
gomp_mutex_t lock;
#endif
/* This is the count of the number of threads that have exited the work
share construct. If the construct was marked nowait, they have moved on
to other work; otherwise they're blocked on a barrier. The last member
of the team to exit the work share construct must deallocate it. */
unsigned threads_completed;
union {
/* This is the next iteration value to be allocated. */
long next;
unsigned long long next_ull;
void *copyprivate;
};
union {
gomp_ptrlock_t next_ws;
struct gomp_work_share *next_free;
};
uintptr_t *task_reductions;
unsigned inline_ordered_team_ids[0];
};字段解释:
首先是主角:
struct gomp_work_share它表示 一个工作共享(work-sharing)构造的状态,比如:
#pragma omp for#pragma omp sections#pragma omp single
每个 parallel 区域内的工作共享语句会对应创建一个这样的结构,供 team 中所有线程共享。它控制任务分配、同步(如 ordered)、调度策略等。
1️⃣ 调度信息相关
enum gomp_schedule_type sched;
int mode;sched: 调度策略,如static,dynamic,guided等。-
mode: 一般用于标志当前的执行模式,例如 ordered/nowait 启用情况。2️⃣ 迭代参数
union {
struct {
long chunk_size;
long end;
long incr;
};
struct {
unsigned long long chunk_size_ull;
unsigned long long end_ull;
unsigned long long incr_ull;
};
};- 存储循环的基本信息:chunk 大小、终止条件、增量
-
使用
union是为了支持long与unsigned long long两种精度循环3️⃣
ordered相关同步机制
union {
unsigned *ordered_team_ids;
struct gomp_doacross_work_share *doacross;
};
unsigned ordered_num_used;
unsigned ordered_owner;
unsigned ordered_cur;这些字段用于 ordered 区块的线程顺序控制:
ordered_team_ids: 环形队列,记录哪些线程进入过 ordered 区块ordered_owner: 当前“被认可”的线程 IDordered_cur: 当前应该进入 ordered 区块的线程位置doacross: 是 OpenMP 5.0 引入的跨迭代依赖控制(不常用)
4️⃣ work share 内存管理链表
struct gomp_work_share *next_alloc;- 用于连接一批
gomp_work_share,每次for语句进入都会新建一个。 - 每个
team通常维护一个work_shares[]数组做池化。
5️⃣ 锁 + 线程完成计数
gomp_mutex_t lock;
unsigned threads_completed;lock: 控制访问如next等共享字段,防止数据竞争-
threads_completed: 统计完成循环的线程数- 如果不是
nowait,就等所有线程结束后回收资源
6️⃣ 迭代分配/Copyprivate 数据
- 如果不是
union {
long next;
unsigned long long next_ull;
void *copyprivate;
};next/next_ull: 下一个待分配的迭代值(用于 dynamic、guided)-
copyprivate: 用于single copyprivate的数据传递7️⃣ 链接字段(下一个工作共享)
union {
gomp_ptrlock_t next_ws;
struct gomp_work_share *next_free;
};next_ws: 链接下一个work_share(同一个线程块里的多个循环)-
next_free: 表示这个结构回收到 free list 中8️⃣ 任务归约与 inline ordered cache
uintptr_t *task_reductions;
unsigned inline_ordered_team_ids[0];task_reductions: 支持task reduction特性(OpenMP 4.0+)inline_ordered_team_ids[0]: 小 team 可以用这个数组避免动态分配
| 功能 | 字段 |
|---|---|
| 调度策略控制 | sched, chunk_size, end |
| 任务划分迭代控制 | next, incr |
| ordered 执行支持 | ordered_team_ids, ordered_owner 等 |
| 同步与线程完成 | lock, threads_completed |
| 结构生命周期管理 | next_alloc, next_ws |
| 高效内存布局 | inline_ordered_team_ids[0] |
总结(for work_share)
在 OpenMP 的并行区域中,当执行到一个 #pragma omp for 语句时,GCC 的 libgomp 会为这个 for 循环分配并初始化一个新的 gomp_work_share 结构体,用于:
- 保存这个循环的调度方式(schedule)
- 保存迭代范围(start, end, increment)
- 保存 chunk 大小(chunk_size)
- 管理
next字段,用于多个线程领取迭代任务 - 管理 ordered 区域的执行顺序
- 管理 task reduction(如果有)
- 跟踪有多少线程完成了工作共享块
- 链接下一个 work_share
| 特性 | gomp_work_share 的作用 |
|---|---|
| 一对一 | 每个 #pragma omp for → 一个 gomp_work_share |
| 多线程共享 | 所有线程都访问这个结构体分配任务 |
| 生命周期 | 循环执行完后被最后一个线程释放或缓存 |
举个例子:
#pragma omp parallel
{
#pragma omp for schedule(dynamic)
for (int i = 0; i < 1000; ++i)
work(i);
}- 当线程进入
#pragma omp for,调用GOMP_parallel_loop_start()或GOMP_loop_runtime_start(); - 然后会通过
gomp_loop_init()创建并初始化一个新的gomp_work_share; - 所有线程通过这个共享的
work_share结构体,从next处动态领取迭代区间。
举2个例子:
#pragma omp parallel
{
#pragma omp for
for (int i = 0; i < 100; ++i) { ... }
#pragma omp for
for (int j = 0; j < 200; ++j) { ... }
}- 这里会创建 两个独立的
gomp_work_share实例; - 它们通过
team->work_share_list_alloc和work_shares[i].next_alloc进行管理和缓存复用。
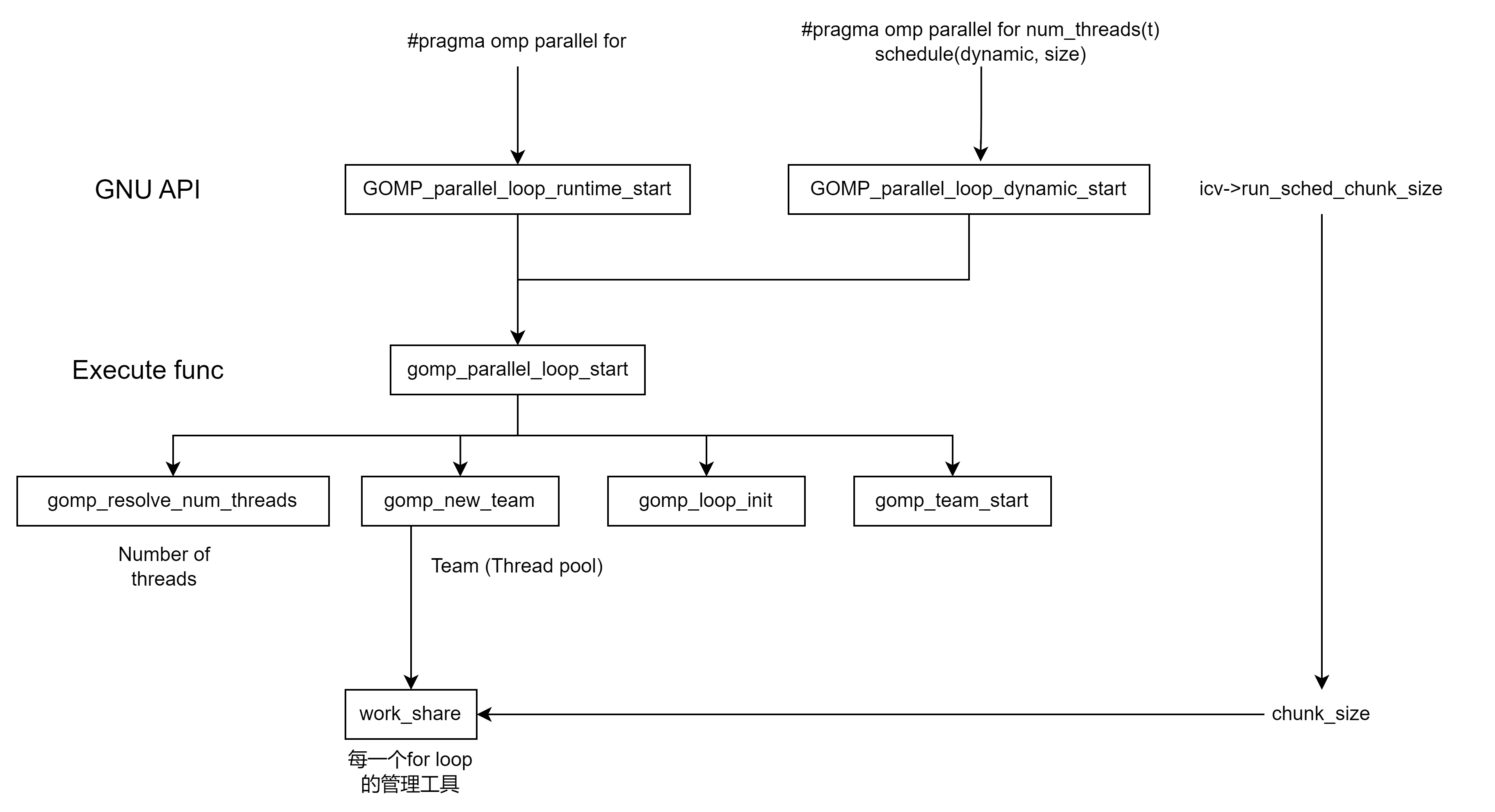
loop init
在我们初始化work_share的配置后,接下来我们就要对loop 初始化了。具体大家看源码及注释。
我们这里的重点是,初始化了chunk_size
详细解析见 dynamic 调度方式分析 一节:
OpenMP For Construct dynamic 调度方式实现原理和源码分析 - 一无是处的研究僧 - 博客园
/* Initialize the given work share construct from the given arguments. */
static inline void
gomp_loop_init (struct gomp_work_share *ws, long start, long end, long incr,
enum gomp_schedule_type sched, long chunk_size)
{
// 1.设置调度方式和循环参数
ws->sched = sched;
ws->chunk_size = chunk_size; // 在这里初始化了chunk_size
// 2. **处理循环是否为空(Zero Iteration)**
ws->end = ((incr > 0 && start > end) || (incr < 0 && start < end))
? start : end;
// 3.设置步长和下一个迭代开始点
ws->incr = incr;
ws->next = start;
// 4. 如果是 dynamic 调度,还要处理 chunk 和溢出保护
if (sched == GFS_DYNAMIC)
{
ws->chunk_size *= incr;
#ifdef HAVE_SYNC_BUILTINS
{
/* For dynamic scheduling prepare things to make each iteration
faster. */
struct gomp_thread *thr = gomp_thread ();
struct gomp_team *team = thr->ts.team;
long nthreads = team ? team->nthreads : 1;
if (__builtin_expect (incr > 0, 1))
{
/* Cheap overflow protection. */
if (__builtin_expect ((nthreads | ws->chunk_size)
>= 1UL << (sizeof (long)
* __CHAR_BIT__ / 2 - 1), 0))
ws->mode = 0;
else
ws->mode = ws->end < (LONG_MAX
- (nthreads + 1) * ws->chunk_size);
}
/* Cheap overflow protection. */
else if (__builtin_expect ((nthreads | -ws->chunk_size)
>= 1UL << (sizeof (long)
* __CHAR_BIT__ / 2 - 1), 0))
ws->mode = 0;
else
ws->mode = ws->end > (nthreads + 1) * -ws->chunk_size - LONG_MAX;
}
#endif
}
}
一句话总结就是:
gomp_loop_init() 就是把 for 循环的调度信息(start/end/incr/sched/chunk)规范化并填入 work_share 结构体,供后面多个线程安全、快速地并发领取迭代区间使用。
举个例子:
比如你写的代码是:
#pragma omp parallel for schedule(dynamic, 5)
for (int i = 0; i < 20; ++i)
work(i);进入并行区域后会发生:
-
调用
gomp_new_team()分配 team; -
team 中的
work_shares[0]被gomp_loop_init()初始化为:ws->sched = GFS_DYNAMIC ws->chunk_size = 5 ws->incr = 1 ws->next = 0 ws->end = 20 -
后续多个线程竞争性从
ws->next开始领取chunk_size大小的区间; -
ws->mode如果满足条件,则动态领取时会走快速路径。
如果不写chunk_size,这边应该是多少?
不同的调度不一样
| 调度方式(schedule) | 默认 chunk_size |
说明 |
|---|---|---|
static |
自动均分整个迭代空间 | 编译时根据线程数 n 和总迭代数 N 直接分成 n 份 |
dynamic |
chunk_size = 1 |
每个线程每次领取 1 个迭代 |
guided |
动态变化(见下面) | 初始大块,逐渐缩小 |
auto/runtime |
取决于运行时设置 | 环境变量或实现默认值 |
对于dynamic调度
这里以 schedule(dynamic, chunk_size) 为例,看看线程是如何处理 chunk 的:
(1)共享数据结构:gomp_work_share
-
所有线程共享一个
gomp_work_share ws; -
ws->next是一个原子变量,表示“下一次可以被领取的起点”。(2)每个线程执行时,会调用
gomp_iter_dynamic_next
这个函数会: -
加锁(或用 atomic 操作)读取
ws->next; -
给当前线程分配一段区间
[start, start + chunk_size); -
然后更新
ws->next += chunk_size; -
如果超出
ws->end,说明任务全部分配完了,线程就退出循环。
(3)例子:schedule(dynamic, 3)
#pragma omp parallel for schedule(dynamic, 3)
for (int i = 0; i < 10; ++i)
work(i);线程领取过程如下(假设 3 个线程):
| 第几次领取 | 线程 ID | 获得区间 | next 更新为 |
|---|---|---|---|
| 1 | T0 | [0, 3) | 3 |
| 2 | T1 | [3, 6) | 6 |
| 3 | T2 | [6, 9) | 9 |
| 4 | T0 | [9, 10) | 10 |
注意:最后一段可能不足 chunk_size,线程会自动裁剪。
✅ 总结一下
-
如果你不指定
chunk_size,那:static:默认均分;dynamic:默认chunk_size = 1;
-
chunk 是每个线程从共享的
gomp_work_share中动态“抢”出来的; -
抢任务的函数最终是通过
gomp_iter_dynamic_next()类似函数完成的; -
为了加速这种调度,OpenMP 实现(如 libgomp)会为 dynamic 准备 fast path(比如
ws->mode)避免频繁加锁。
但如果是 schedule(static),就不是这样了!
不加锁、不抢任务,原因是:
- 静态分配意味着 每个线程在一开始就知道它自己的任务区间;
- 所以根本 不需要共享更新
ws->next,也就 不需要加锁; work_share在这里的作用是存储共享参数(例如start/end/incr),但每个线程的起始索引是 预先计算好的。
调度总结
| 调度方式 | 是否加锁 | 是否动态更新 ws->next |
线程何时知道任务区间 |
|---|---|---|---|
static |
❌ 否 | ❌ 否 | ✅ 编译/运行时立即知道 |
static,chunk |
❌ 否 | ❌ 否 | ✅ 由 tid 和 chunk 算出 |
dynamic |
✅ 是 | ✅ 是 | ⏳ 运行时从 work_share 领取 |
guided |
✅ 是 | ✅ 是 | ⏳ 每次都动态计算领取大小 |
示例(static vs dynamic)
schedule(static, 2),4线程:
#pragma omp parallel for schedule(static, 2)
for (int i = 0; i < 8; ++i)
work(i);| 线程 ID | 分配的迭代(静态) |
|---|---|
| T0 | i = 0,1 |
| T1 | i = 2,3 |
| T2 | i = 4,5 |
| T3 | i = 6,7 |
🟢 每个线程一启动就知道要干哪两项,直接干,不抢任务、不加锁。
schedule(dynamic, 2),4线程:
#pragma omp parallel for schedule(dynamic, 2)
for (int i = 0; i < 8; ++i)
work(i);| 步骤 | 哪个线程拿了哪个 chunk | next |
|---|---|---|
| 1 | T0 拿到 i = 0,1 | 2 |
| 2 | T1 拿到 i = 2,3 | 4 |
| 3 | T2 拿到 i = 4,5 | 6 |
| 4 | T3 拿到 i = 6,7 | 8 |
🟡 每个线程在干完后要加锁或原子操作更新 next。
gomp_iter_dynamic_next
gcc/libgomp/iter.c at 02a6f9a0df149bbc06e3bbb20be4dde199225296 · gcc-mirror/gcc
这里是对dynamic调用的学习(static的就直接是静态分配了)
这个函数的目的是:
在
schedule(dynamic)模式下,每个线程调用它来 从gomp_work_share结构中领取下一个可用的迭代区间(start, end)。
线程之间通过原子操作来并发更新 ws->next,确保不会重复领取任务。
这里的函数流程图大致可以看为:
Input: gomp_work_share ws (包含 end, chunk, incr, mode, next)
▼
是否开启快速模式? (ws->mode)
▼
Yes No
▼ ▼
原子加 chunk,获得 tmp 使用 CAS 死循环尝试更新 ws->next
▼ ▼
if tmp >= end if 成功更新
▼ ▼
return false 设置 *pstart = start
▼ 设置 *pend = nend
else return true
设置 *pstart = tmp
设置 *pend = min(tmp + chunk, end)
return true
bool
gomp_iter_dynamic_next (long *pstart, long *pend)
{
struct gomp_thread *thr = gomp_thread ();
struct gomp_work_share *ws = thr->ts.work_share;
long start, end, nend, chunk, incr;
end = ws->end;
incr = ws->incr;
chunk = ws->chunk_size;
if (__builtin_expect (ws->mode, 1))
{
// 可以使用 `__sync_fetch_and_add` 进行快速原子加法,这种模式非常快。
long tmp = __sync_fetch_and_add (&ws->next, chunk);
if (incr > 0){
if (tmp >= end)
return false;
nend = tmp + chunk;
if (nend > end)
nend = end;
*pstart = tmp;
*pend = nend;
return true;
}
else{
if (tmp <= end)
return false;
nend = tmp + chunk;
if (nend < end)
nend = end;
*pstart = tmp;
*pend = nend;
return true;
}
}
// `mode = 0`:说明有可能涉及到整型溢出,要使用较慢的 CAS 死循环逻辑,手动比较并交换 `ws->next`。
start = __atomic_load_n (&ws->next, MEMMODEL_RELAXED);
while (1)
{
long left = end - start;
long tmp;
if (start == end)
return false;
if (incr < 0)
{
if (chunk < left)
chunk = left;
}
else
{
if (chunk > left)
chunk = left;
}
nend = start + chunk;
tmp = __sync_val_compare_and_swap (&ws->next, start, nend);
if (__builtin_expect (tmp == start, 1))
break;
start = tmp;
}
*pstart = start;
*pend = nend;
return true;
}
#endif /* HAVE_SYNC_BUILTINS */| 变量名 | 含义 |
|---|---|
ws->next |
当前尚未被线程领取的迭代起点(线程通过它来“抢任务”) |
chunk |
每次领取的任务块大小 |
incr |
步长(正负表示正向或逆向迭代) |
mode |
表示是否可以走“快速路径”(前提是没有溢出风险) |
pstart/pend |
输出参数,线程拿到的 [start, end) 区间 |
线程同步靠什么?
ws->next是核心状态变量- 所有线程共享它
- 使用
__sync_fetch_and_add或__sync_val_compare_and_swap来实现原子更新
| 特性 | static | dynamic |
|---|---|---|
| 分配时机 | 一次性预分配 | 每个线程运行时动态领取 |
| 线程同步 | 不需要同步 | 需要原子操作(如 fetch_add) |
| 开销 | 非常小 | 相对较高 |
| 适合场景 | 每次迭代时间大致相同 | 每次迭代时间不均,需负载均衡 |
| 数据结构 | 线程只读 work_share |
所有线程并发修改 work_share->next |
#pragma omp for schedule(static[, chunk])
│
▼
gomp_parallel_loop_start()
│
▼
gomp_loop_static_start()
│
├── gomp_work_share_start()
│ └── gomp_work_share_init()
│
├── gomp_loop_init() ← 初始化调度参数
│
└── gomp_iter_static_next() ← 第一次获取迭代段
│
▼
后续每次调度也会继续调用 gomp_iter_static_next()static中chunk的设置
gcc/libgomp/iter.c at 02a6f9a0df149bbc06e3bbb20be4dde199225296 · gcc-mirror/gcc
源码的注释已经很清晰了,大家可以看看
/* This function implements the STATIC scheduling method. The caller should
iterate *pstart <= x < *pend. Return zero if there are more iterations
to perform; nonzero if not. Return less than 0 if this thread had
received the absolutely last iteration. */
int
gomp_iter_static_next (long *pstart, long *pend)
{
struct gomp_thread *thr = gomp_thread ();
struct gomp_team *team = thr->ts.team;
struct gomp_work_share *ws = thr->ts.work_share;
unsigned long nthreads = team ? team->nthreads : 1;
if (thr->ts.static_trip == -1)
return -1;
/* Quick test for degenerate teams and orphaned constructs. */
if (nthreads == 1)
{
*pstart = ws->next;
*pend = ws->end;
thr->ts.static_trip = -1;
return ws->next == ws->end;
}
/* We interpret chunk_size zero as "unspecified", which means that we
should break up the iterations such that each thread makes only one
trip through the outer loop. */
if (ws->chunk_size == 0)
{
unsigned long n, q, i, t;
unsigned long s0, e0;
long s, e;
if (thr->ts.static_trip > 0)
return 1;
// 如果这里我们发现chunk_size是0,说明是静态调度,我们将手动计算每一个线程要做的工作
/* Compute the total number of iterations. */
s = ws->incr + (ws->incr > 0 ? -1 : 1);
n = (ws->end - ws->next + s) / ws->incr;
i = thr->ts.team_id;
/* Compute the "zero-based" start and end points. That is, as
if the loop began at zero and incremented by one. */
q = n / nthreads;
t = n % nthreads;
if (i < t)
{
t = 0;
q++;
}
s0 = q * i + t;
e0 = s0 + q;
/* Notice when no iterations allocated for this thread. */
if (s0 >= e0)
{
thr->ts.static_trip = 1;
return 1;
}
/* Transform these to the actual start and end numbers. */
s = (long)s0 * ws->incr + ws->next;
e = (long)e0 * ws->incr + ws->next;
*pstart = s;
*pend = e;
thr->ts.static_trip = (e0 == n ? -1 : 1);
return 0;
}
else
{
unsigned long n, s0, e0, i, c;
long s, e;
/* Otherwise, each thread gets exactly chunk_size iterations
(if available) each time through the loop. */
s = ws->incr + (ws->incr > 0 ? -1 : 1);
n = (ws->end - ws->next + s) / ws->incr;
i = thr->ts.team_id;
c = ws->chunk_size;
/* Initial guess is a C sized chunk positioned nthreads iterations
in, offset by our thread number. */
s0 = (thr->ts.static_trip * nthreads + i) * c;
e0 = s0 + c;
/* Detect overflow. */
if (s0 >= n)
return 1;
if (e0 > n)
e0 = n;
/* Transform these to the actual start and end numbers. */
s = (long)s0 * ws->incr + ws->next;
e = (long)e0 * ws->incr + ws->next;
*pstart = s;
*pend = e;
if (e0 == n)
thr->ts.static_trip = -1;
else
thr->ts.static_trip++;
return 0;
}
}
这段函数 gomp_iter_static_next() 是 GCC OpenMP Runtime 中 static 调度策略(schedule(static))的核心实现,用于为当前线程分配它的下一段迭代区间([pstart, pend))。它是 #pragma omp for 中 schedule(static[, chunk_size]) 的具体执行逻辑。
计算当前线程(
thr->ts.team_id)在static策略下,应当处理哪一段迭代区间[pstart, pend)。
它内部根据 chunk_size 是否为 0(未指定)分为两种处理策略:
✅ 情况一:chunk_size == 0(用户没指定)
🧮 策略:每个线程平均分一次任务,不再参与调度
即:
#pragma omp for schedule(static) // 没写chunk_size每个线程只处理 一段连续的区间,不再往 work_share 里“多次领取任务”。分配逻辑如下:
🧾 步骤解释:
s = ws->incr + (ws->incr > 0 ? -1 : 1);
n = (ws->end - ws->next + s) / ws->incr;-
计算总的迭代次数
n。 -
让每个线程均分:
q = n / nthreads;,然后前面t个线程各多一个任务。 -
当前线程是
i = thr->ts.team_id,它就会得到从s0到e0的迭代。
最终再映射回真实循环起始值(不是从 0 开始):
s = (long)s0 * ws->incr + ws->next;
e = (long)e0 * ws->incr + ws->next;✅ 情况二:chunk_size > 0(用户指定)
🧮 策略:每个线程每次从循环里“领一份 chunk”
即:
#pragma omp for schedule(static, 2)每个线程可能进入多次,每次拿 chunk_size 个迭代任务。OpenMP runtime 维护一个私有的 static_trip 表示第几次领取任务。
s0 = (thr->ts.static_trip * nthreads + i) * c;
e0 = s0 + c;这个策略其实模拟一个全局静态分配的调度,只不过每个线程每次固定步长地从自己的起点继续领活。
| 阶段 | 函数 | 作用 |
|---|---|---|
| 初始化 loop | gomp_loop_static_start() |
每个线程第一次分配循环任务 |
| 初始化调度元数据 | gomp_loop_init() |
设置 start, end, incr, chunk_size 等 |
| 每次领任务 | gomp_iter_static_next() |
每个线程每次“领”一段 [start, end) 迭代 |
chunk_size的设置
gcc/libgomp/icv.c at 02a6f9a0df149bbc06e3bbb20be4dde199225296 · gcc-mirror/gcc
回归原始,我们最初的chunk_size是从icv->run_sched_chunk_size 传下来的。
而icv里确定的方式,依旧是根据调度方式确定:
void omp_set_schedule (omp_sched_t kind, int chunk_size)
{
struct gomp_task_icv *icv = gomp_icv (true);
switch (kind & ~omp_sched_monotonic)
{
case omp_sched_static:
if (chunk_size < 1)
chunk_size = 0;
icv->run_sched_chunk_size = chunk_size;
break;
case omp_sched_dynamic:
case omp_sched_guided:
if (chunk_size < 1)
chunk_size = 1;
icv->run_sched_chunk_size = chunk_size;
break;
case omp_sched_auto:
break;
default:
return;
}
icv->run_sched_var = kind;
}
启动线程
team_start我们上集也解析了,这集我们就不解析了。